开云体育官方网站 CES 2026:英伟达怎样将自动驾驶推向“物理AI”期间?

在2026年海外滥用电子展(CES 2026)上,英伟达首创东谈主兼CEO黄仁勋围绕“Physical AI”(物理AI)发表了主题演讲,激励科技圈与汽车产业界的高度柔软。
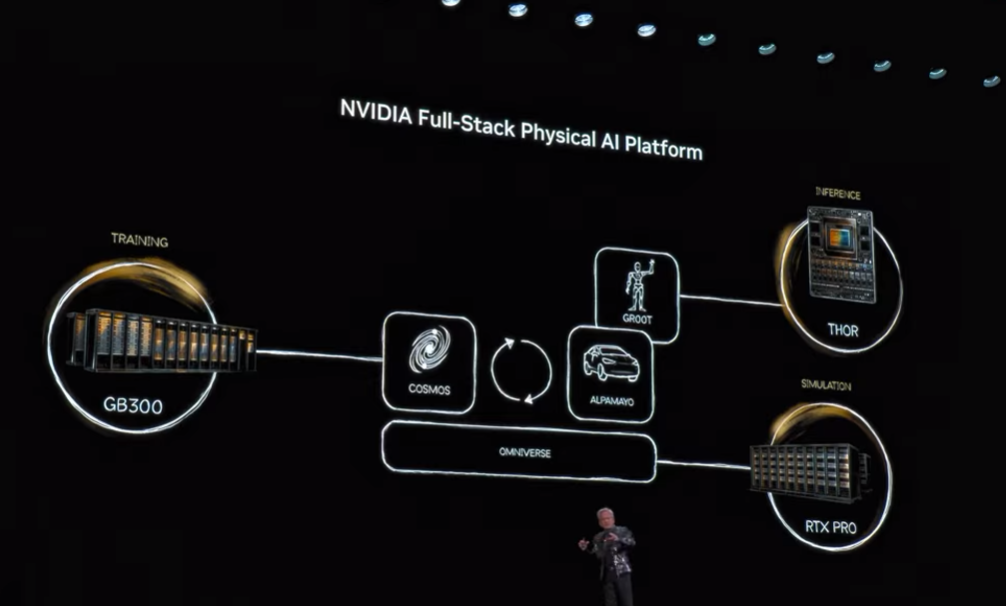
图片开端:英伟达CES演讲截图
所谓物理AI,在黄仁勋看来,是指机器必须不可只是在虚构环境中运算,而是要在真实宇宙中对自身行径雅致。
英伟达的表述明晰而系统:AI系统要是只可停留在数字宇宙,它的经济与社会价值将十分有限;而要进入试验宇宙,AI不仅要清爽环境,还要对其物理行径雅致。在这种布景下,“物理AI的‘ChatGPT时间’仍是到来”。
本文将从产业大趋势、架构变革、自动驾驶落地、融合案例与行业性挑战五个维度,客不雅梳理英伟达在CES 2026上发布的主要技能场合与关联家具。
一、行业视角:自动驾驶进入“物千里着拖拉能”期间
曩昔十多年,自动驾驶技能的发展经验了从限定驱动、感知驱动,再到学习驱动的阶段性演进。在这一进度中,自动驾驶系统徐徐提高了对环境的感知精度和旅途盘算推算能力,但其中枢仍然侧重于统计模式识别和数据拟合。
在CES 2026上,英伟达围绕“物理AI”淡薄了一种不同于传统学习驱动架构的技能场合。黄仁勋在演讲中示意,物理AI的中枢并不单是识别图像或信号,而是清爽试验宇宙中的因果联系与物理抑制,并在此基础上对自身行径雅致。这一变化并非单点技能升级,而是面向真实宇宙利用的系统级重构,尤其体当今对顶点和长尾场景的处理能力上。
映射到自动驾驶领域,这意味着系统不再仅凭据感知着力或模子输出奏凯生成猖狂提示,而是需要在复杂交通环境中识别潜在风险、评估多种可能情境,并推演下一走路为。迎面临施工区域、相当规交通行径或未被充分粉饰的场景时,系统需要以接近东谈主类驾驶员的步地进行推理,而不是皆备依赖多量特定场景的数据查考。
基于这一想路,英伟达在CES 2026上将自动驾驶系统再行界说为一种“推理平台”。其中枢飞动在于,从以“感知 + 大模子推演”为主的堆栈,向“清爽 + 推理 + 决策”的架构移动。英伟达方面强调,这一变化并非浅易扩大模子鸿沟,而是自动驾驶系统功能定位的诊疗。
在推理型架构下,自动驾驶系统需要具备三项要津能力:对物理环境中因果联系的清爽能力;在零星和顶点场景下保抓决策鲁棒性的能力;以及对自身推理过程进行审计和发挥的能力。这些能力在以数据拟合为主的传统学习驱动架构中难以皆备保险,尤其是在面临长尾事件时,系统阐扬时常受限于查考数据的粉饰范围。
恰是基于上述技能判断,英伟达将机器东谈主和自动驾驶视为物理AI最早兑现鸿沟化利用的要点领域,凤凰彩票官方网站并围绕这一场合鼓动关联架构和器具的演进。
二、全栈重构:从芯片到仿真、再到模子与器具链的协同
物理AI的兑现,并非单一算法或单款芯片能够完成的任务,而是跨层级、跨模块的系统工程。在CES 2026上,英伟达发布了一系列与物理AI关联的全栈技能与家具,粉饰核默算力、仿真平台、AI模子与灵通生态四大维度。
1. 核默算力:Rubin平台的计谋意旨
{jz:field.toptypename/}英伟达推出了代号为Vera Rubin的新一代AI筹办平台,这是一个集成多颗芯片与高速互联的合座架构。凭据现场发布的信息,该平台不仅升迁了推理与查考性能,还显耀裁减了运行本钱,为大鸿沟物理AI的查考与部署奠定了算力基础。
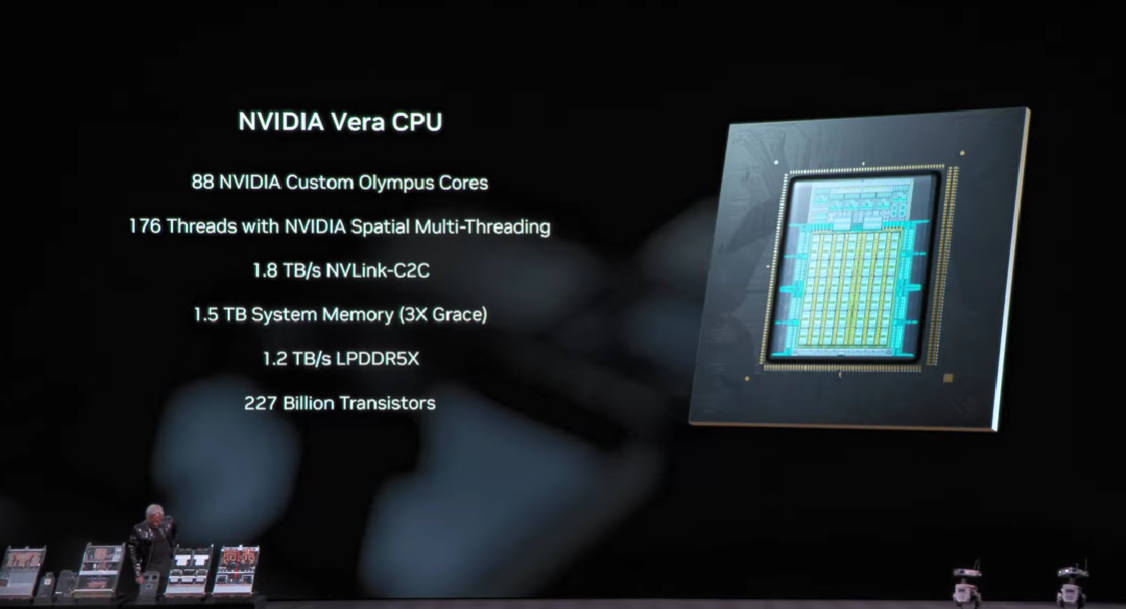
图片开端:英伟达CES演讲截图
值得提防的是,英伟达在CES 2026上证据Vera Rubin平台已进入全面出产阶段,并方针于2026下半年启动插足市集,这意味着英伟达正在从技能研发向产业供应链快速鼓动。
2. 仿真与试验对接能力
物理AI最大的挑战之一,是怎样将试验宇宙的复杂性引入查考历程,而不是被局限于骨子数据网罗所能粉饰的范围。英伟达淡薄了高精度仿真系统,通过模拟真实环境中的物理特点和动态互动,使AI在虚构宇宙中生成丰富的查考样本,并在试验宇宙中评估其阐扬。
这一挨次的中枢价值在于,开云体育官方网站通过仿真不错有用补足真实宇宙数据的稀缺性,并裁减奏凯在真实环境中查考所带来的安全风险与本钱。
3. 模子与器具链
在模子层面,英伟达展示了面向物千里着拖拉能的基础模子与专用AI模块,涵盖宇宙模子、推理模子等。这些模子不仅不错处理感知任务,还具备对物理环境的因果推理能力,使其更恰当在自动驾驶、机器东谈主等物理交互领域使用。
为增强建树者的骨子出产力,英伟达还推动开源模子与数据集的发布,裁减行业合座进初学槛,并加快构建以其平台为中枢的生态体系。
三、融合鼓动与产业落地:多方考证计谋场合
为了推动自动驾驶大鸿沟交易化落地,英伟达在CES 2026上走漏了一系列融合落地进展,涵盖量产车型部署、生态融合伙伴联系,以及灵通建树平台对产业链的放射。
其中最受柔软的进展是Mercedes-Benz CLA量产车型将最初搭载英伟达的自动驾驶软件栈。据悉,NVIDIA DRIVE AV软件已在全新梅赛德斯-飞奔CLA上亮相,该车型方针在2026年第一季度于好意思国市集推出,并在随后进入欧洲特地他地区市集。该系统提供的自动驾驶能力属于Level 2++级别,有望成为NVIDIA全栈自动驾驶处理决策的初次量产考证。

图片开端:英伟达
这一融合案例不仅绚丽着英伟达自动驾驶技能在量产车型上的首批利用,也体现出顶级整车厂对合座技能旅途的招供。此外,梅赛德斯-飞奔与英伟达的融合已超出单一车型维持,两边在软件界说车辆架构、AI驱动自动驾驶能力及数字化建树历程上抓续深入融合,推动自动驾驶功能从工程考证向可交易化部署鼓动。
除了梅赛德斯-飞奔,英伟达在更宽泛的自动驾驶生态中也抓续鼓动融合伙伴联系。此前,NVIDIA DRIVE平台已被包括Uber、Stellantis、Lucid、Nuro等多家出行做事商与整车企业禁受,用于建树兼具自动驾驶和机器东谈主出行能力的车辆系统,并正在围绕Hyperion和DRIVE AGX架构构建合资的数据工场与模子查考体系。
英伟达通过灵通模子(如Alpamayo)、仿真平台(AlpaSim)及Halos认证体系,试图打造一个可供融合伙伴分享与迭代的自动驾驶建树生态,裁减单体厂商清静研发本钱并加快翻新闭环。
合座来看,这些融合与骨子部署进展标明,英伟达的自动驾驶计谋正在从“研发考证”向“交易化落地”迈进,既包括在量产车型中的早期集成,也囊括更宽泛的产业融合与生态拓展。
四、行业竞争与生态挑战
尽管物理AI提供了更明晰的工程旅途,但它也对行业淡薄了新的条款与挑战:
仿真与试验鸿沟:无论仿真何等细密,都无法皆备重现试验环境中的统共噪声和偶发情况。因此,怎样确保从仿真查考移动到试验宇宙中的决策安全性,是统共这个词行业亟需处理的问题。
圭臬与监管条款:物理AI在自动驾驶场景中的决策输出,将奏凯联系到安全与包袱界限。这就条款关联圭臬与法例快速跟进,酿成明确的安全审查体系与数据透明机制。
生态整合与平台锁定:英伟达通过开源器具与模子构建了一个潜在的行业基础身手级生态,但这也眩惑了其他芯片与软件提供商的竞争。如安在灵通与生态构建之间均衡,是行业下一阶段的要津议题。
无论怎样,英伟达仍是拉开了自动驾驶从传统意旨上的“感知驱动”向“清爽与推理驱动”飞动的序幕。当AI驱动的自动驾驶汽车能确切清爽物理环境并能对其行径雅致时,智能汽车将不再只是是“装备了传感器与算力的交通器具”,而是在试验宇宙中具备自主判断与行径能力的物千里着拖拉能体。
这一趋势,好像才确切绚丽着自动驾驶与物理AI期间的拐点正在到来。
结语
CES 2026上的英伟达,不仅呈现了技能家具,更展示了一种面向试验宇宙的筹办形而上学:AI不仅要清爽宇宙,还需要在试验环境中以可控、可考证的步地作出决策并奉行行径。
关于汽车行业而言,这代表自动驾驶从传统意旨上的“感知驱动”向“清爽与推理驱动”飞动简直切启动。而英伟达试图通过其全栈架构,将这一瞥变变成产业试验。
当自动驾驶系统具备对物理环境的清爽能力,汽车的界说自己也随之蜕变。智能汽车,不再只是是“装备了传感器与算力的交通器具”,而是在试验宇宙中具备自主判断与行径能力的物千里着拖拉能体。
这一趋势,好像才确切绚丽着自动驾驶与物理AI期间的拐点正在到来。
 备案号:
备案号: